Componentes Electrónicos
En esta sección se mostrará ejemplos de cómo conectar y utilizar distintos componentes de electrónica que podrían ser utilizados en los robots del coliseo atómico.
Motor DC
El Motor DC requiere de una placa L298N para poder ser controlado desde la ESP32. Se recomienda una alimentación de 9V separada de la placa de desarrollo para alimentar los motores y tengan una buena velocidad. Son ideales para las ruedas que dan movimiento al carro.

Guía de Conexiones
Para controlar un motor DC con una ESP32 y un driver L298N, se requiere de una fuente de alimentación externa para el motor, ya que la ESP32 no puede suministrar la corriente necesaria. El L298N actúa como un "puente H" que permite a la ESP32 controlar tanto la dirección como la velocidad del motor.
-
Conexión a la ESP32:
-
ESP32 GND→L298N GND(es importante que compartan tierra) -
ESP32 GPIO26→L298N IN1 -
ESP32 GPIO27→L298N IN2 -
ESP32 GPIO25→L298N ENA(si se va a usar PWM) -
Conexión de la Fuente de Alimentación Externa:
-
Fuente Externa Positivo (+) ` → `L298N V12 -
Fuente Externa Negativo (-) ` → `L298N GND -
Conexión del Motor DC:
-
Motor Terminal 1→L298N OUT1 -
Motor Terminal 2→L298N OUT2
Notas sobre el pin ENA y el control de velocidad (PWM):
-
El módulo L298N suele venir con un jumper de plástico preinstalado en el pin
ENA(yENB). -
Si este jumper está puesto, el motor estará siempre habilitado a máxima potencia y no podrás controlar su velocidad mediante software.
-
Para poder controlar la velocidad del motor con la ESP32, se debe retirar el jumper del pin
ENAy conectar un pin GPIO de la ESP32 (comoGPIO25) aENA. -
La ESP32 enviará una señal PWM (Pulse Width Modulation) a este pin
ENA. El PWM permite simular un voltaje variable controlando el "tiempo de encendido" de la señal, lo que a su vez controla la velocidad efectiva del motor. En AtomVM, esto se gestiona mediante el móduloLEDC.
Código de Ejemplo
defmodule MotorTest do
@left_motor_pin_1 26
@left_motor_pin_2 27
def start() do
:gpio.set_pin_mode(@left_motor_pin_1, :output)
:gpio.set_pin_mode(@left_motor_pin_2, :output)
:io.format('Setup de motor finalizado~n')
loop()
end
defp loop() do
:io.format('Moviendo hacia adelante~n')
set_motor_direction(:forward)
Process.sleep(3000)
:io.format('Deteniendo motor~n')
set_motor_direction(:stop)
Process.sleep(2000)
:io.format('Moviendo hacia atrás~n')
set_motor_direction(:reverse)
Process.sleep(3000)
loop()
end
defp set_motor_direction(direction) do
case direction do
:forward ->
:gpio.digital_write(@left_motor_pin_1, :high)
:gpio.digital_write(@left_motor_pin_2, :low)
:reverse ->
:gpio.digital_write(@left_motor_pin_1, :low)
:gpio.digital_write(@left_motor_pin_2, :high)
:stop ->
:gpio.digital_write(@left_motor_pin_1, :low)
:gpio.digital_write(@left_motor_pin_2, :low)
_ ->
:io.format('Dirección de motor inválida: ~p~n', [direction])
end
end
endServomotor
A diferencia de un motor DC, el servomotor puede ser controlado con precisión, pero son más lentos. En este caso se utilizará un Micro servo SG90.

Guía de Conexiones
Para conectar un servomotor SG90 a la ESP32:
-
Pines del servomotor SG90:
-
Cable Rojo: VCC -
Cable Marrón: GND -
Cable Naranja: Señal PWM -
Conexión a la ESP32:
-
VCC(Servo) →ESP32 3v3 -
GND(Servo) →ESP32 GND -
Signal(Servo) →ESP32 GPIO(Ej:GPIO13)
Código de Ejemplo
defmodule ServoTest do
@servomotor_pin 13
@servo_pwm_channel 0 # canal LEDC a usar para el servo
@servo_pwm_timer 0 # timer LEDC a usar para el servo
@servo_pwm_freq 50 # servos usan 50Hz
@servo_pwm_resolution 10 # 10 bits de resolución (0-1023)
# valores de duty cycle para ángulos comunes del SG90
# calculados para 10 bits de resolución (máx 1023) y 50Hz (periodo 20ms):
# 1ms (0 grados) -> (1/20) * 1023 = ~51
# 1.5ms (90 grados) -> (1.5/20) * 1023 = ~77
# 2ms (180 grados) -> (2/20) * 1023 = ~102
@duty_0_degrees 51
@duty_90_degrees 77
@duty_180_degrees 100
def start() do
set_up_servo()
:io.format('Servo setup finished. Starting movement sequence...~n')
set_servo_angle(@duty_0_degrees)
Process.sleep(1500)
set_servo_angle(@duty_90_degrees)
Process.sleep(1500)
set_servo_angle(@duty_180_degrees)
Process.sleep(1500)
:io.format('Movement sequence completed. Entering infinite sleep.~n')
:timer.sleep(:infinity)
end
defp set_up_servo() do
:ok =
LEDC.timer_config(
duty_resolution: @servo_pwm_resolution,
freq_hz: @servo_pwm_freq,
speed_mode: LEDC.high_speed_mode(),
timer_num: @servo_pwm_timer
)
:ok =
LEDC.channel_config(
channel: @servo_pwm_channel,
duty: @duty_90_degrees, # iniciar el servo en una posición central
gpio_num: @servomotor_pin,
speed_mode: LEDC.high_speed_mode(),
hpoint: 0,
timer_sel: @servo_pwm_timer
)
end
defp set_servo_angle(duty_cycle_value) do
:io.format('Setting servo duty to: ~p~n', [duty_cycle_value])
:ok = LEDC.set_duty(LEDC.high_speed_mode(), @servo_pwm_channel, duty_cycle_value)
:ok = LEDC.update_duty(LEDC.high_speed_mode(), @servo_pwm_channel)
end
endEvitar Obstáculos
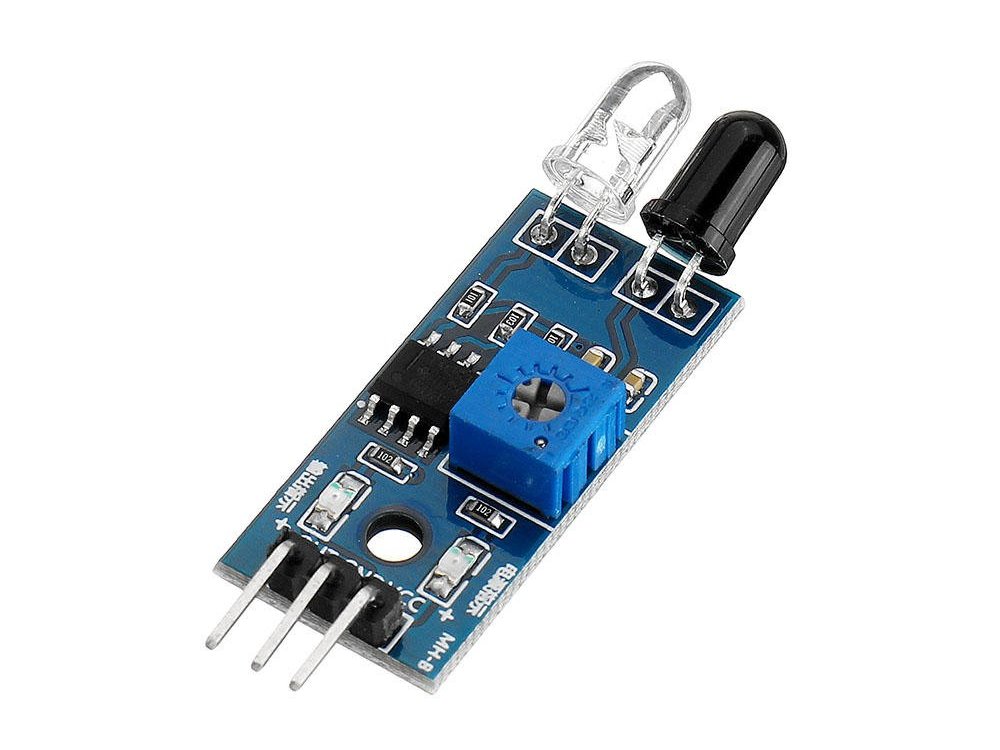
El módulo de evitación de obstaulos utiliza un sensor infrarrojo para enviar una señal al detectar un obstáculo.
Guía de Conexiones
Para conectar un Sensor de Obstáculos IR a la ESP32:
-
Pines del Sensor de Obstáculos IR:
-
VCC: Alimentación -
GND: Tierra -
OUT: Salida digital -
Conexión a la ESP32:
-
VCC(Sensor) → Pin3V3de la ESP32 -
GND(Sensor) → PinGNDde la ESP32 -
OUT(Sensor) → Pin GPIO de la ESP32 (Ej: GPIO33)
Notas:
-
Algunos módulos tienen un potenciómetro para ajustar la distancia de detección.
-
La salida
OUTes típicamenteLOWcuando detecta un obstáculo yHIGHcuando no detecta nada.
Código de Ejemplo
defmodule DetectTest do
@led_pin 2
@detection_pin 33
def start() do
:gpio.set_pin_mode(@led_pin, :output)
:gpio.set_pin_mode(@detection_pin, :input)
loop()
end
defp loop() do
level = read_detection(@detection_pin)
:gpio.digital_write(@led_pin, level)
Process.sleep(100)
loop()
end
defp read_detection(pin) do
result = GPIO.digital_read(pin)
:io.format('Result = ~p~n', [result])
result
end
endSensor de temperatura y humedad
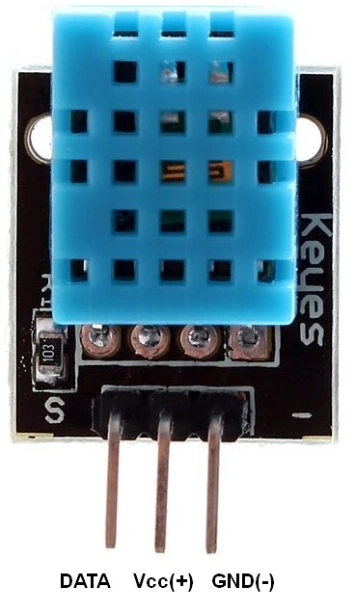
El módulo de DHT11 es un sensor digital que mide la temperatura ambiente y la humedad, usando un sensor de humedad capacitativo y un termistor, mostrando los datos a través de un pin digital.
Requiere de un driver adicional: https://github.com/atomvm/atomvm_dht
Guía de Conexiones
Para conectar un sensor DHT11 a la ESP32:
-
Pines del Sensor DHT:
-
VCC(o+): Alimentación (3.3V) -
DATA(oSIG): Pin de datos -
GND(o-): Tierra -
(Nota: Algunos módulos DHT tienen 3 pines, otros tienen 4 y el pin no usado se deja flotante. Asegúrate de identificar
VCC,DATAyGNDcorrectamente). -
Conexión a la ESP32:
-
VCC(DHT) → Pin3V3de la ESP32 -
GND(DHT) → PinGNDde la ESP32 -
DATA(DHT) → Pin GPIO de la ESP32 (Ej:GPIO21)
Código de Ejemplo
defmodule DhtTest do
@dht_pin 21
def start() do
{:ok, dht} = :dht.start(%{pin: @dht_pin, device: :dht_11})
loop(dht)
end
defp loop(dht) do
take_reading(dht)
Process.sleep(5000)
loop(dht)
end
defp take_reading(dht) do
case :dht.take_reading(dht) do
{:ok, {{temp, tempFractional}, {hum, humFractional}}} ->
:io.format('Temperature: ~p.~pC Humidity: ~p.~p%~n', [
temp,
tempFractional,
hum,
humFractional
])
error ->
:io.format('Error taking reading: ~p~n', [error])
end
end
end defp deps do
[
{:exatomvm, git: "https://github.com/atomvm/ExAtomVM/"},
{:dht, git: "https://github.com/UncleGrumpy/atomvm_dht"}
]
endSensor de movimiento
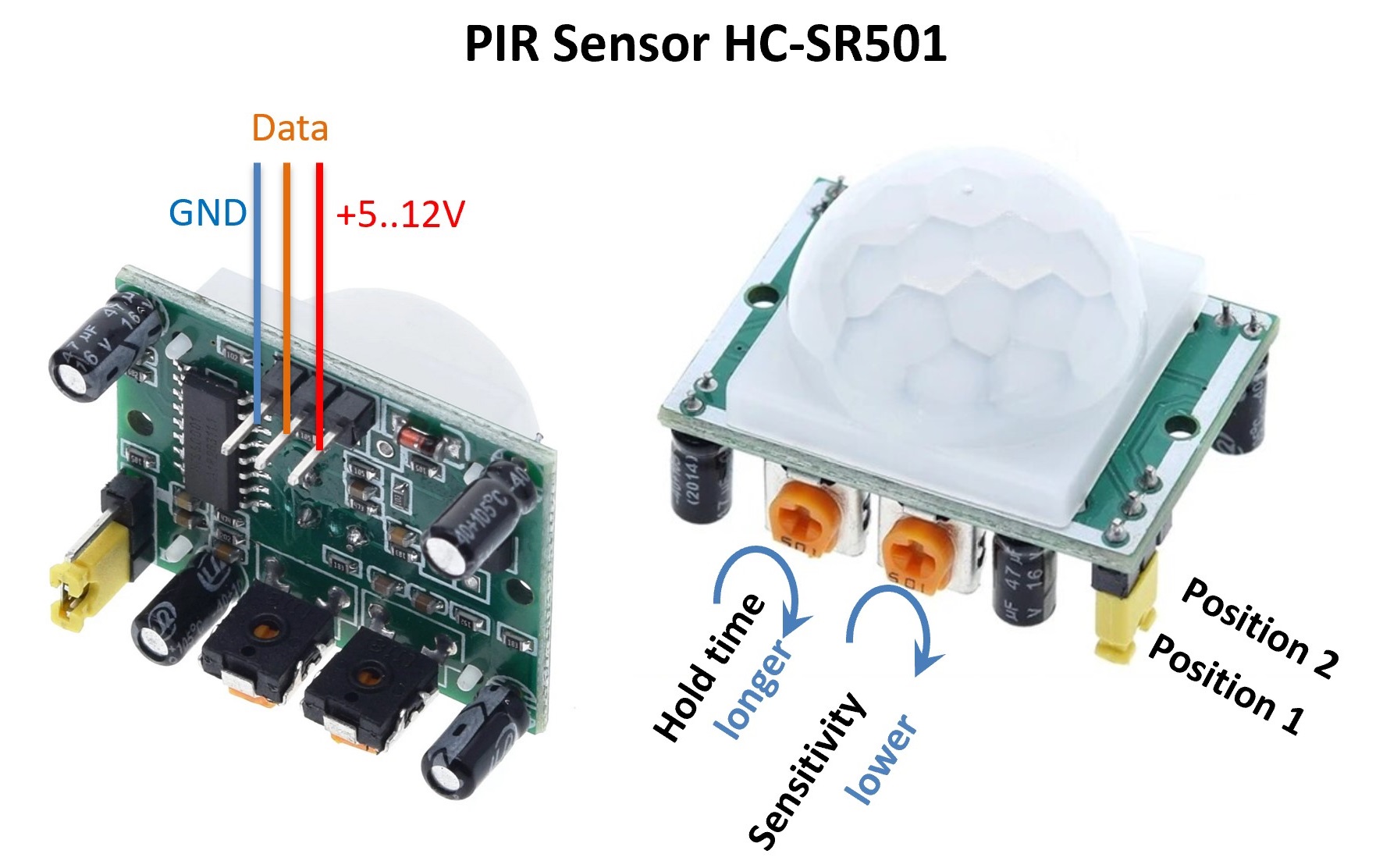
El sensor de movimiento PIR mide la luz infrarroja emitida en su campo de visión. Cada cuerpo libera energía térmica, lo que permite que el sensor los detecte.
Guía de Conexiones
Para conectar un Sensor de Movimiento PIR a la ESP32:
-
Pines del Sensor PIR:
-
VCC: Alimentación -
GND: Tierra -
OUT: Salida digital (HIGH cuando detecta movimiento, LOW en reposo) -
Conexión a la ESP32:
-
VCC(PIR) → Pin3V3de la ESP32 -
GND(PIR) → PinGNDde la ESP32 -
OUT(PIR) → Pin GPIO de la ESP32 (Ej: GPIO26)
Código de Ejemplo
defmodule SensorTest do
@led_pin 2
@motion_pin 26
def start() do
:gpio.set_pin_mode(@led_pin, :output)
:gpio.set_pin_mode(@motion_pin, :input)
loop()
end
defp loop() do
level = read_detection(@motion_pin)
:gpio.digital_write(@led_pin, level)
Process.sleep(100)
loop()
end
defp read_detection(pin) do
result = GPIO.digital_read(pin)
:io.format('Result = ~p~n', [result])
result
end
endFotoresistencia
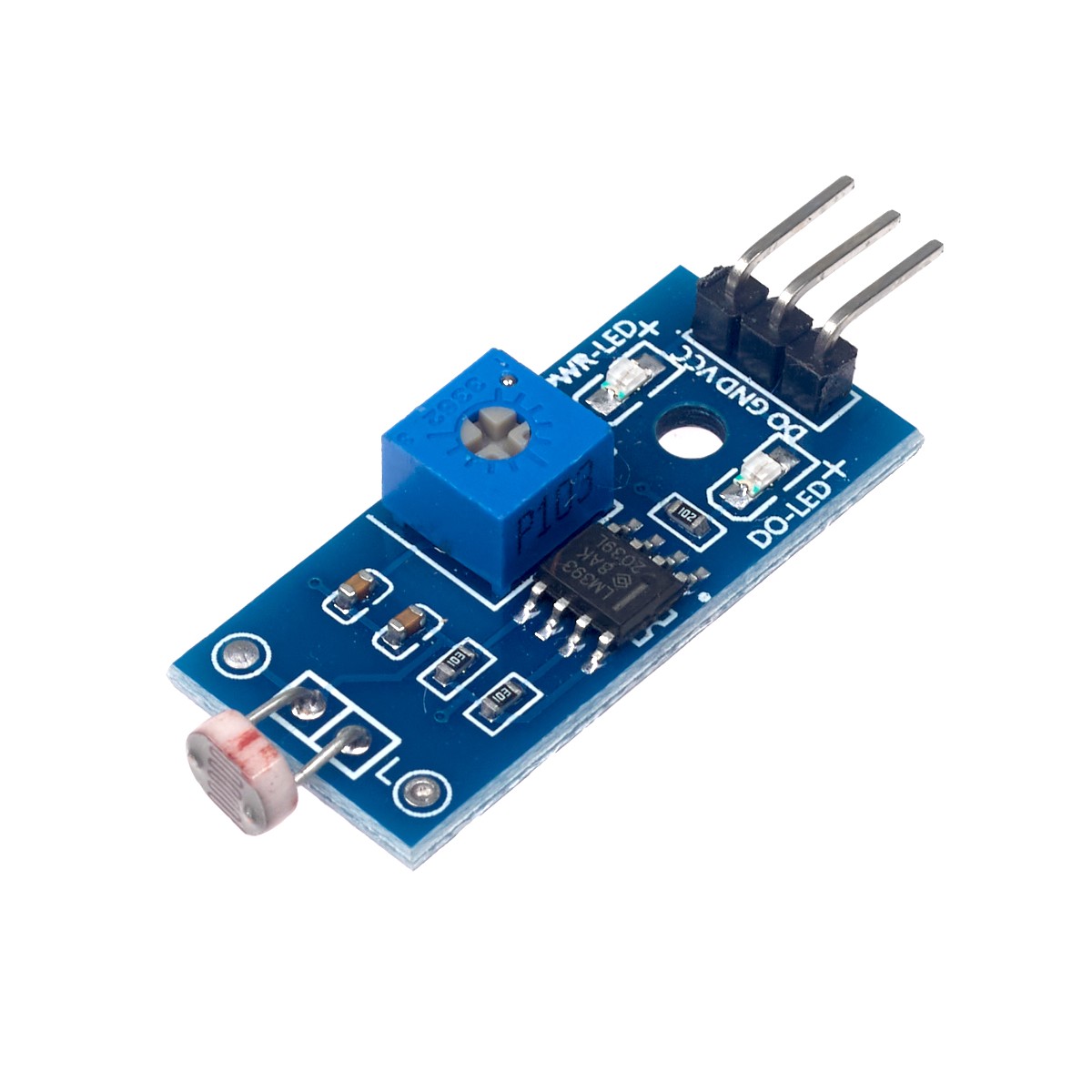
La fotoresistencia son útiles para crear robots que sigan líneas o eviten obstáculos según el nivel de luz.
Guía de Conexiones
Para conectar un Módulo de Fotoresistencia a la ESP32:
-
Pines del Módulo de Fotoresistencia:
-
VCC: Alimentación -
GND: Tierra -
OUT(oDO): Salida digital -
Conexión a la ESP32:
-
VCC→ Pin3V3de la ESP32 -
GND→ PinGNDde la ESP32 -
OUT→ Pin GPIO de la ESP32 (Ej: GPIO26)
Notas:
-
Estos módulos suelen tener un potenciómetro para ajustar el umbral de luz que activa la salida digital.
El ejemplo utilizado para el sensor de movimento también aplica para la fotoresistencia.
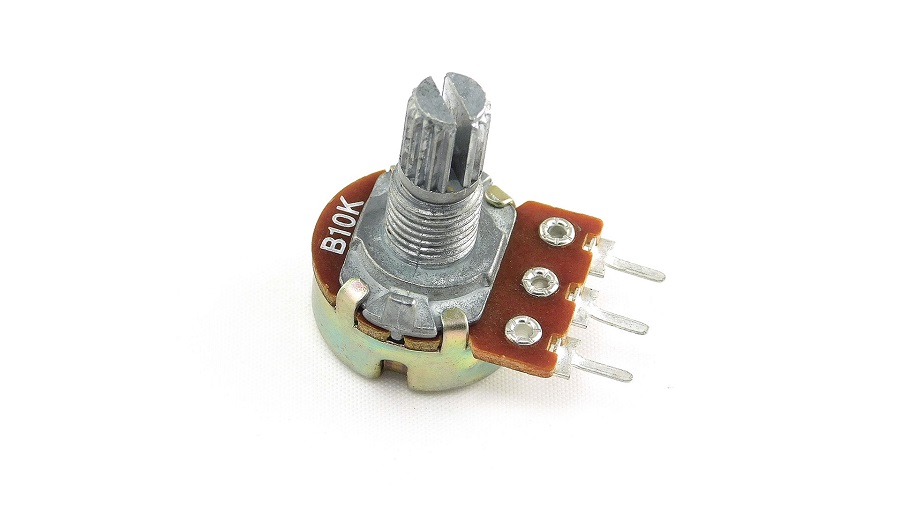
Potenciometro
Los pontenciómetros son útiles para configurar la intensidad de ciertas configuraciones.
Guía de Conexiones
Para conectar un Potenciómetro a la ESP32:
-
Pines del Potenciómetro:
-
Pin Exterior 1:
VCC(Alimentación) -
Pin Exterior 2:
GND(Tierra) -
Pin Central (Wiper):
SIG(Salida de señal analógica) -
Conexión a la ESP32:
-
Pin Exterior 1 → Pin
3V3de la ESP32 -
Pin Exterior 2 → Pin
GNDde la ESP32 -
Pin Central → Pin ADC de la ESP32 (Ej:
GPIO34)
Notas:
-
Los pines ADC de la ESP32 son específicos.
GPIO32-39son los más comunes para ADC1. -
La lectura del potenciómetro proporcionará un valor analógico que varía según la posición del eje.
Código de Ejemplo
defmodule PotentiometerTest do
@potentiometer_pin 34
def start do
:ok = :esp_adc.start(@potentiometer_pin, bitwidth: :bit_max, atten: :db_12)
loop()
end
def loop() do
read_potentiometer(@potentiometer_pin)
loop()
end
defp read_potentiometer(pin) do
{:ok, {raw, mv}} =
:esp_adc.read(pin, [:raw, :voltage, samples: 48])
:io.format('ADC pin ~p raw value=~p millivolts=~p~n', [pin, raw, mv])
end
endZumbador activo y pasivo
Los zumbadores activos tienen un oscilador interno que produce un tono, lo que los hace fácil de usar. En cambio, los zumbadores pasivos requieren de una señal externa para generar un tono, ofreciendo mayor control a cambio de mayor complejidad.

Guía de Conexiones
Para conectar un Zumbador Activo a la ESP32:
-
Pines del Zumbador Activo:
-
Pin Positivo (
+): Alimentación (pin más largo) -
Pin Negativo (
-): Tierra (pin más corto) -
Conexión a la ESP32:
-
Pin Positivo → Pin GPIO de la ESP32 (Ej: GPIO26)
-
Pin Negativo → Pin
GNDde la ESP32
Notas:
-
Un zumbador activo produce un tono fijo cuando se le aplica voltaje. No requiere una señal PWM para generar sonido.
Código de Ejemplo
defmodule BuzzerTest do
@led_pin 2
@detection_pin 33
@buzzer_pin 26
def start() do
:gpio.set_pin_mode(@led_pin, :output)
:gpio.set_pin_mode(@detection_pin, :input)
:gpio.set_pin_mode(@buzzer_pin, :output)
loop()
end
defp loop() do
level = read_detection(@detection_pin)
:gpio.digital_write(@led_pin, level)
:gpio.digital_write(@buzzer_pin, level)
Process.sleep(100)
loop()
end
defp read_detection(pin) do
result = :gpio.digital_read(pin)
:io.format('Result = ~pn', [result])
result
end
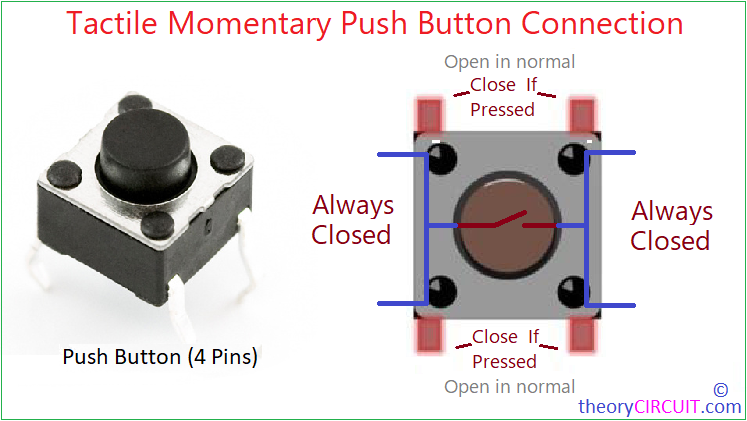
endBotones
Un botón pulsador táctil común de 4 pines tiene sus contactos internos configurados de manera que los dos pines en cada uno de sus lados largos están siempre eléctricamente conectados entre sí. Al presionar el botón, se establece temporalmente una conexión entre estos dos lados que de otro modo estarían separados, cerrando el circuito. Esta configuración interna significa que para cablear el botón, solo necesitas usar un pin de cada lado opuesto, ya que el otro pin en el mismo lado ofrece un punto de conexión idéntico.
Guía de Conexiones
En el ejemplo se utiliza un pull-up interno. Para conectar un Botón Pulsador a la ESP32 con pull-up interno:
-
Pines del Botón Pulsador: Dos terminales
-
Conexión a la ESP32:
-
Terminal 1 del Botón → Pin GPIO de la ESP32 (Ej: GPIO33)
-
Terminal 2 del Botón → Pin
GNDde la ESP32
Notas:
-
Con esta configuración, el pin GPIO estará
HIGH(3.3V) cuando el botón no esté presionado (gracias al pull-up interno). -
Cuando el botón es presionado, el pin GPIO se conecta a
GNDy su lectura seráLOW. -
Esto elimina la necesidad de un resistor externo.
Código de Ejemplo
defmodule ButtonTest do
@test_duty 3000
@test_fade_time 2000
@high_speed_timer 0
@low_speed_timer 1
@led_1 2
@led_2 23
@button_pin 33
def start do
GPIO.set_pin_mode(@button_pin, :input)
GPIO.set_pin_pull(@button_pin, :up)
ledc_hs_timer = [
{:duty_resolution, 13},
{:freq_hz, 5000},
{:speed_mode, LEDC.high_speed_mode()},
{:timer_num, @high_speed_timer}
]
:ok = LEDC.timer_config(ledc_hs_timer)
ledc_ls_timer = [
{:duty_resolution, 13},
{:freq_hz, 5000},
{:speed_mode, LEDC.low_speed_mode()},
{:timer_num, @low_speed_timer}
]
:ok = LEDC.timer_config(ledc_ls_timer)
ledc_channel = [
[
{:channel, 0},
{:duty, 0},
{:gpio_num, @led_1},
{:speed_mode, LEDC.high_speed_mode()},
{:hpoint, 0},
{:timer_sel, @high_speed_timer}
],
[
{:channel, 1},
{:duty, 0},
{:gpio_num, @led_2},
{:speed_mode, LEDC.high_speed_mode()},
{:hpoint, 0},
{:timer_sel, @high_speed_timer}
]
]
Enum.each(ledc_channel, fn channel_config -> :ok = LEDC.channel_config(channel_config) end)
:ok = LEDC.fade_func_install(0)
loop(ledc_channel)
end
def loop(ledc_channel) do
if read_button(@button_pin) == :pressed do
wait_for_release(@button_pin)
end
:io.format('1. LEDC fade up to duty = p~n', [@test_duty])
Enum.each(ledc_channel, fn channel_config -> do_stage_1(channel_config) end)
Process.sleep(@test_fade_time)
:io.format('2. LEDC fade down to duty = 0~n')
Enum.each(ledc_channel, fn channel_config -> do_stage_2(channel_config) end)
Process.sleep(@test_fade_time)
loop(ledc_channel)
end
defp do_stage_1(channel_config) do
speed_mode = :proplists.get_value(:speed_mode, channel_config)
channel = :proplists.get_value(:channel, channel_config)
:ok = LEDC.set_fade_with_time(speed_mode, channel, @test_duty, @test_fade_time)
:ok = LEDC.fade_start(speed_mode, channel, LEDC.fade_no_wait())
end
defp do_stage_2(channel_config) do
speed_mode = :proplists.get_value(:speed_mode, channel_config)
channel = :proplists.get_value(:channel, channel_config)
:ok = LEDC.set_fade_with_time(speed_mode, channel, 0, @test_fade_time)
:ok = LEDC.fade_start(speed_mode, channel, LEDC.fade_no_wait())
end
defp read_button(pin) do
result = GPIO.digital_read(pin)
:io.format('Result = ~p~n', [result])
case result do
:low -> :pressed
:high -> :released
end
end
defp wait_for_release(pin) do
Process.sleep(50)
if read_button(pin) == :pressed do
wait_for_release(pin)
else
:ok
end
end
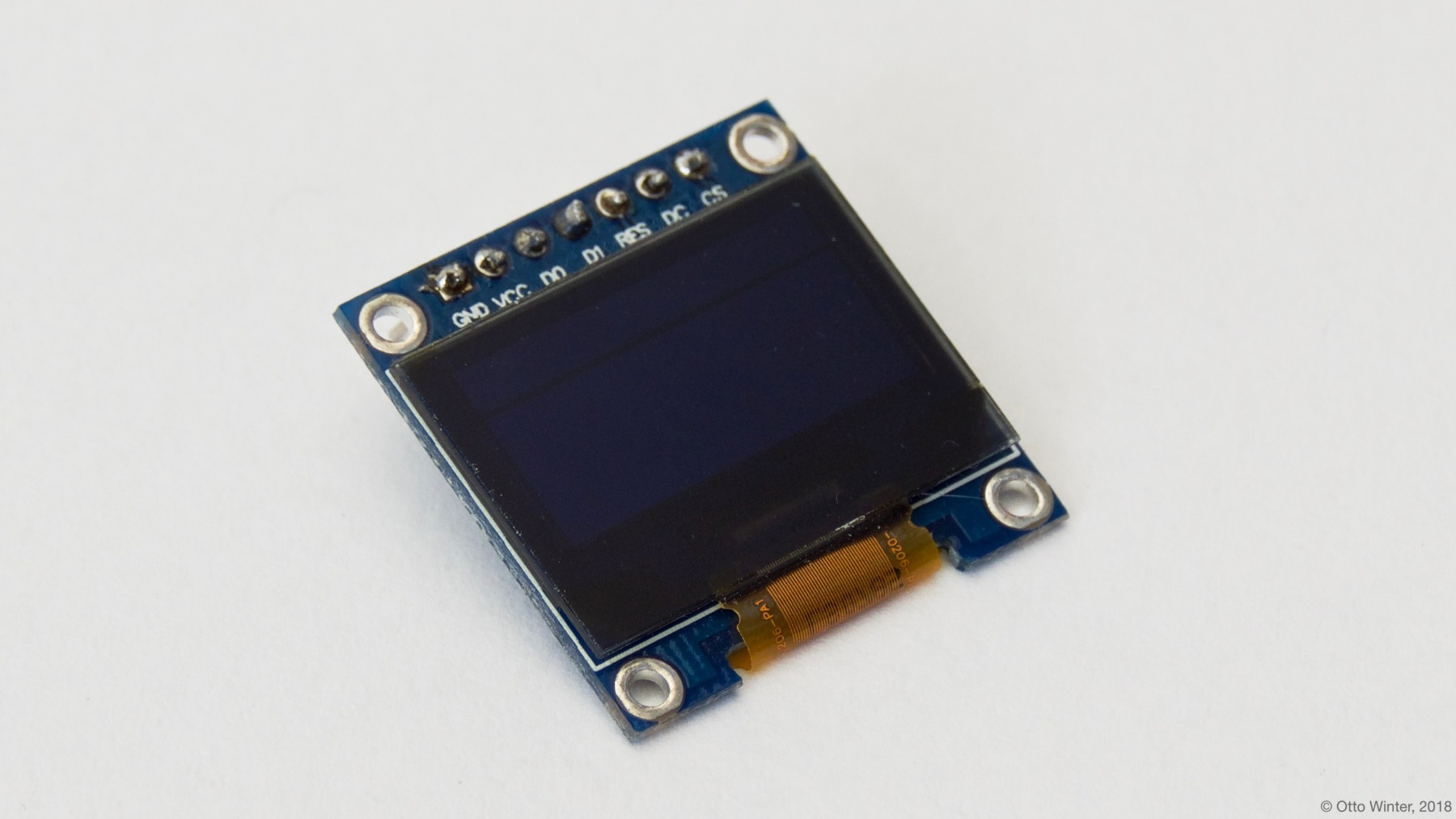
endPantalla OLED
La pantalla OLED SSD1306 utiliza el protocolo de comunicación I2C para conectarse a la ESP32. Para la transmisión de datos, el pin SDA del display se conecta al pin de datos I2C de la ESP32 (generalmente GPIO21), y el pin SCL del display al pin de reloj I2C de la ESP32 (comúnmente GPIO22).
Requiere de un driver adicional: https://github.com/atomvm/atomgl
Guía de Conexiones
Para conectar una Pantalla OLED (SSD1306 I2C) a la ESP32:
-
Pines de la Pantalla OLED:
-
VCC: Alimentación -
GND: Tierra -
SCL: Línea de reloj I2C -
SDA: Línea de datos I2C -
Conexión a la ESP32:
-
VCC(OLED) → Pin3V3de la ESP32 -
GND(OLED) → PinGNDde la ESP32 -
SCL(OLED) → PinGPIO22de la ESP32 (Pin SCL I2C por defecto) -
SDA(OLED) → PinGPIO21de la ESP32 (Pin SDA I2C por defecto)
Código de Ejemplo
defmodule SsdTest do
@sda_pin 21
@scl_pin 22
def start do
i2c_opts = [
sda: @sda_pin,
scl: @scl_pin,
clock_speed_hz: 40000,
peripheral: "i2c0"
]
i2c_host = :i2c.open(i2c_opts)
display_opts = [
width: 128,
height: 64,
compatible: "solomon-systech,ssd1306",
i2c_host: i2c_host,
reset: 18
]
display = :erlang.open_port({:spawn, "display"}, display_opts)
{:ok, pid} =
HelloScene.start_link([],
display_server: {:port, display}
)
Process.sleep(:infinity)
end
end
defmodule HelloScene do
def start_link(args, opts) do
:avm_scene.start_link(__MODULE__, args, opts)
end
def init(_args) do
:erlang.send_after(100, self(), :update_display)
{:ok, %{width: 320, height: 240}}
end
def handle_info(:update_display, %{width: width, height: height} = state) do
items = [
{:text, 10, 20, :default16px, 0x000000, 0xFFFFFF, "Hello, World!"},
{:rect, 0, 0, width, height, 0xFFFFFF}
]
{:noreply, state, [{:push, items}]}
end
end defp deps do
[
{:avm_scene, git: "https://github.com/atomvm/avm_scene/"},
{:exatomvm, git: "https://github.com/atomvm/ExAtomVM/"}
]
end