Historia de la Robótica y Automatización
En este capítulo se dará un vistazo general a los hitos relevantes para la robótica y mecatrónica, desde los primeros autómatas hasta la actualidad con sistemas que utilizan machine learning para tomar decisiones y analizar su entorno.
La palabra Autómata (del latín automăta y este del griego αὐτόματος autómatos, 'espontáneo' o 'con movimiento propio'. Según la RAE, "máquina que imita la figura y los movimientos de un ser animado") es un equivalente tecnológico de lo que en la actualidad serían los robots autónomos. Si el robot es antropomorfo se conoce como androide.
Seres Artificiales
La palabra hebrea "golem" (גלם), se refiere a la materia sin forma, como un trozo de arcilla. De acuerdo con el Talmud, un golem es también un cuerpo con forma humana, pero sin alma ni capacidad de hablar. El Golem es hecho tradicionalmente de arcilla y cobra vida a través de diversas técnicas místicas meditativas, o de alguna otra forma misteriosa. La creación de un golem presenta entonces ventajas y desventajas, el golem es fuerte, pero no inteligente; si se le ordena llevar a cabo una tarea, la llevará a cabo de un modo sistemático, lento y ejecutando las instrucciones de modo literal, sin cuestionamiento ninguno. Famosa en este sentido es una anécdota según la cual la esposa del rabino le pidió al golem que fuera "al río a sacar agua" a lo que el golem accedió, pero al pie de la letra: fue al río y comenzó a sacar agua del mismo sin parar, hasta que terminó por inundar la ciudad.

De acuerdo con la leyenda, en el siglo XVI, Rav Iehudá ben Betzalel Loew, más conocido como el Maharal de Praga, creó un golem para que patrullara las calles de la ciudad y protegiera a la comunidad judía. De una u otra manera, eventualmente el Golem se salió de control y tuvieron que matarlo. De acuerdo con la leyenda, su cuerpo fue escondido en el ático de la antigua sinagoga en Praga (el Altneuschul en el Barrio Judío de Praga, República Checa). Se rumorea que soldados nazis entraron al ático en la época de la ocupación alemana de Checoslovaquia durante la Segunda Guerra Mundial, y nunca salieron. Además del supuesto Golem de Rav Loew, hubo rumores de que también otros Rabinos crearon golems, como el Gaón de Vilna en el siglo XVIII (Rav Eliahu Kramer de Vilna, Lituania), y otros. En la cultura popular, algunos sostienen que las historias del Golem influyeron en el "Frankenstein" de Mary Shelly.

La creación del reloj mecánico
El ser humano ha ideado mecanismos que permitan automatizar tareas cotidianas o laboriosas utilizando el poder del agua, viento o fuego desde las primeras civilizaciones (por ejemplo el Molino Hidráulico).
La Edad Media proporcionó a Europa una nueva invención: el reloj mecánico, un ingenio fascinante que transformó la vida de los habitantes de las ciudades e introdujo en el mundo occidental los valores de precisión y eficacia.
En monasterios y ciudades el ritmo de trabajo era artificial, a diferencia de lo que ocurría en el campo, cuyo ritmo de trabajo era natural, regido por la trayectoria del sol. Y un ritmo de trabajo artificial debía medirse con un tiempo artificial y un mecanismo que no tenía por qué emular el ritmo de los astros. Así surgió en Occidente el reloj mecánico, que se convertiría en el representante más genuino de su filosofía de la vida y de su filosofía económica, introduciendo valores nuevos como la precisión y la eficacia.
A la vez que se construían campanas y campanarios, se fabricaron mecanismos capaces de mover aquellos carillones, y tales artilugios, que importaron la tecnología de los monasterios, fueron los precedentes de los relojes mecánicos. El objeto de estos primitivos relojes era "dar la hora" con el sonido de una campana; de ahí que el término inglés clock, "reloj", sea muy cercano al alemán glocke y al francés cloche, que significan "campana".

El tiempo era un fluir continuo, pero para construir el reloj era necesario cortarlo, convertirlo en una sucesión de fragmentos: las unidades de tiempo que ahora llamamos minutos y segundos.
La historia del reloj es parte de la historia de la miniaturización: los pesos se sustituyeron por muelles, los relojes pasaron de las torres a las habitaciones, después a los aparadores de las casas, luego a los bolsillos de sus poseedores y finalmente a las muñecas de su propietario.
Este proceso de miniaturización estuvo acompañado por el interés en mejorar la precisión; si la campana debía sonar a una hora convenía que fuera lo más exacta posible.
Con la invención del reloj mecánico se establecieron las bases para mecanismos cada vez más diminutos y portátiles, que sin necesidad de electricidad podían trasladarse y efectuar sofisticados movimientos.
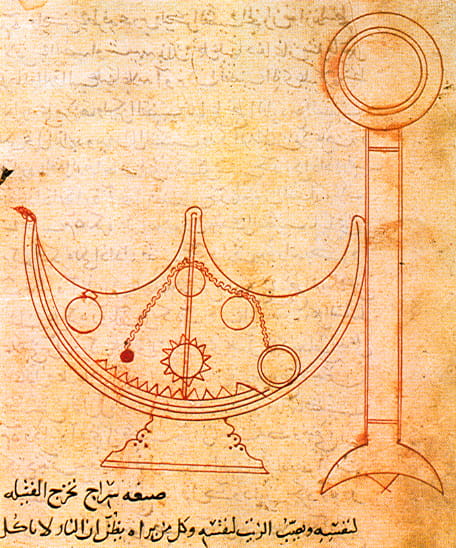
Mecanismos de Banu Musa
Tres sabios musulmanes, que además eran hermanos y vivieron en Bagdad en el siglo IX, no sólo fueron los autores de una veintena de obras que incluían importantes tratados de geometría, astronomía y matemáticas, sino que también idearon montones de ingenios mecánicos, unos de aplicación práctica y otros lúdica, que dejaron descritos en otro de sus libros y constituyen algunos de los antecedentes conocidos más antiguos del concepto de robot. Se apellidaban Banu Musa y se llamaban, de mayor a menor, Abu Ya’far Muhammad, Abu al-Qasim Ahmad y Al-Hasan.
La más famosa de sus obras se titulaba Kitab al-hiyal (Libro de mecanismos ingeniosos). La escribió básicamente Ahmad, el segundo de la saga, y describía aproximadamente un centenar de autómatas e inventos, algunos tan insólitos como una lámpara que se apagaba sola o un instrumento musical que tocaba también por sí mismo. Parte de esos diseños se basaban en originales griegos de Herón de Alejandría y Filón de Bizancio, más otros procedentes de China y Persia; pero los demás eran propios y mucho más avanzados desde el punto de vista tecnológico.
Unos funcionaban por la presión del agua y se aplicaban fundamentalmente a fuentes, para las que también idearon una válvula de hélice. Otros recurrían a sistemas de equilibrio de pesos. Había máscaras antigás, válvulas que se autoabrían y cerraban en caso de incendio, juguetes móviles e incluso un autómata-odalisca que servía el té, en lo que quizá fue el primer robot de la historia. No está nada mal para el siglo IX.
Autómatas Karakuri
El término "Karakuri" en japonés se traduce aproximadamente como "mecanismo" o "truco", capturando el aspecto encantador de estas creaciones. Los autómatas karakuri se desarrollaron principalmente durante el período Edo (1603–1867), una época de relativo aislamiento para Japón bajo el shogunato Tokugawa.
Aunque Japón estaba en gran medida aislado del mundo occidental, sí mantuvo un contacto restringido con algunos comerciantes europeos, lo que permitió que ciertas influencias externas, como la tecnología de medición del tiempo, se filtraran en el país. Los relojeros japoneses, inspirados por los mecanismos de engranajes europeos, adaptaron esas ideas a su propio contexto cultural.
En lugar de replicar los dispositivos europeos, los artesanos japoneses encontraron expresiones únicas, fusionando la practicidad con el juego. Experimentaron con engranajes de madera, levas y mecanismos de cuerda para crear pequeñas y maravillosas muñecas que no solo eran entretenidas, sino también reflejo de la estética japonesa.
En el corazón de cada autómata karakuri se encuentra una meticulosa artesanía que une el arte y la ingeniería. Quizás la versión más icónica sea el chahakobi ningyō, o muñeca que sirve té. Cuando se coloca una taza de té sobre la bandeja de madera que sostiene el autómata, un mecanismo oculto activa a la muñeca, que se desliza hacia adelante.

Una vez que la taza es retirada, la muñeca se detiene en su lugar, como si esperara cortésmente su taza vacía o una amabl e inclinación de cabeza. En su interior, un conjunto de engranajes, resortes y poleas trabaja de manera armoniosa para crear este movimiento elegante. Un karakuri bien construido no requiere electricidad; en su lugar, depende de la tensión de resortes enrollados o de pesas cuidadosamente colocadas, de forma similar a los relojes de cuerda.
Otro modelo cautivador es el moji-kaki ningyō, o muñeca escritora, que sumerge un pequeño pincel en tinta y traza caracteres sobre el papel. Observar cómo la creación mueve su brazo con una precisión asombrosa pone de manifiesto la búsqueda, con siglos de antigüedad, de replicar el movimiento humano mediante medios puramente mecánicos.

La durabilidad y la belleza estética de los autómatas karakuri son testimonio de la dedicación de Japón al arte y a la búsqueda de la perfección. Estas piezas trascienden la mera curiosidad y encarnan el significado cultural de la armonía, el respeto y el servicio ritualizado, conectando al artesano y al público de una manera profundamente humana.

Autómatas de Jaquet-Droz
A pesar de que construyeron muchos más autómatas durante sus carreras se conoce como autómatas de Jaquet-Droz al dibujante, la pianista y el escritor, diseñados y fabricados entre 1768 y 1774 por el relojero suizo Pierre Jaquet-Droz, su hijo Henri-Louis y Jean-Frédéric Leschot.
El dibujante
Formado por unas 2.000 piezas, es capaz de hacer cuatro dibujos distintos a la vez que sigue el movimiento del lápiz con el que los hace con los ojos y, de vez en cuando, sopla su punta para eliminar restos de carbon.
La pianista
Formada con unas 2.000 piezas, toca cinco piezas distintas en un órgano. Pero no es una caja de música sino que toca las piezas de verdad, moviendo sus dedos para presionar las teclas. Cada vez que termina con una de ellas saluda a su público. Igual que el dibujante, mueve los ojos para seguir sus manos, su cuerpo al ritmo de la música, e incluso simula que respira, pues su pecho sube y baja.
El escritor
Formado por algo más de 6.000 piezas no sólo mueve los ojos para seguir la pluma con la que escribe y la cabeza cuando va a mojarla en el tintero sino que es capaz de escribir cualquier texto con un máximo de 40 caracteres en cuatro líneas. Cualquier texto, pues lo que va a escribir se programa mediante unas piezas que se insertan en un disco que tiene en su parte posterior, lo que lo convierte en una de las primeras máquinas programables de la historia.

El telar programable
El telar de Jacquard es un telar mecánico inventado por Joseph Marie Jacquard en diciembre de 1800 y presentado en público en la 2ª Exposición industrial celebrada en París del 19 al 25 de septiembre de 1801 donde recibió una medalla de bronce en un concurso de tejido de redes de pesca. Considerado el primer robot programable, el artilugio utilizaba tarjetas perforadas para conseguir tejer patrones en la tela, permitiendo que hasta los usuarios más inexpertos pudieran elaborar complejos diseños.
El telar de Joseph Marie Jacquard supuso, aparte de un gran avance en la industria textil debido a su mecanización, un antecedente fundamental en la codificación de imágenes que casi dos siglos más tarde vería la luz. La base del telar, las tarjetas perforadas de Jean Falcon eran una prefiguración binaria (muy sencilla eso sí) de cómo almacenar imágenes, como guardar la información para poderlas reproducir a posterior. Las tarjetas daban información sobre patrones y dibujos de una manera fácil: con agujeros o sin; de esta manera se conseguían producir en masa las mismas formas, se estaba copiando una sola imagen. El concepto de archivo de una fotografía es similar ya que se parece a un telar sólo que con mucha más información pero al fin y al cabo cada puntada es un píxel. La maquinaria conforma uno de los antecedentes más antiguos de la computación y de la generación de “bases de datos” en lenguaje binario.
Hasta la llegada de la invención de Jacquard entre cada paso de la lanzadera con la trama había que subir o bajar los hilos de la urdimbre, según correspondiera, a mano. Este proceso era lento y sujeto a errores, por lo que los diseños que se hacían no eran muy complicados. Pero el dispositivo de Jacquard, sin embargo, era capaz de manejar hasta varios cientos de hilos de urdimbre a la vez y de manera extremadamente rápida, lo que sirvió para una mejora exponencial en la velocidad de producción de las telas y en la calidad y complejidad de los diseños que se podían hacer.

La palabra Robot
La palabra “robot” fue usada por primera vez en 1921 cuando el escritor checo Karel Čapek (1890 – 1938) estrena su obra Rossum’s Universal Robot en el teatro nacional de Praga. En realidad, el crédito va a su hermano Josef Čapek, quien la inventó. Karel solo la empleo en su obra. Su origen viene de la palabra eslava robota o roboti (plural), que se refiere al trabajo forzado. La trama de la obra de Čapek era simple, ya que designa a unos autómatas, también conocidos como robots a trabajar de obreros. La palabra “robot” fue utilizada en el imperio austro-húngaro hasta 1848 para referirse a los esclavos y la servidumbre.
De acuerdo a la definición ofrecida por Oxford Languages, un robot es una “Máquina automática programable capaz de realizar determinadas operaciones de manera autónoma y sustituir a los seres humanos en algunas tareas, en especial las pesadas, repetitivas o peligrosas; puede estar dotada de sensores, que le permiten adaptarse a nuevas situaciones.”

La palabra “robot” deriva del término checo robota, que puede significar trabajo que realmente no quieres hacer o trabajo tedioso. Su obra ha sido representada en todo el mundo, y la palabra “robot” fue posteriormente hecha realmente famosa por Isaac Asimov en la década de 1940 (relatos recopilados como Yo, robot en 1950).
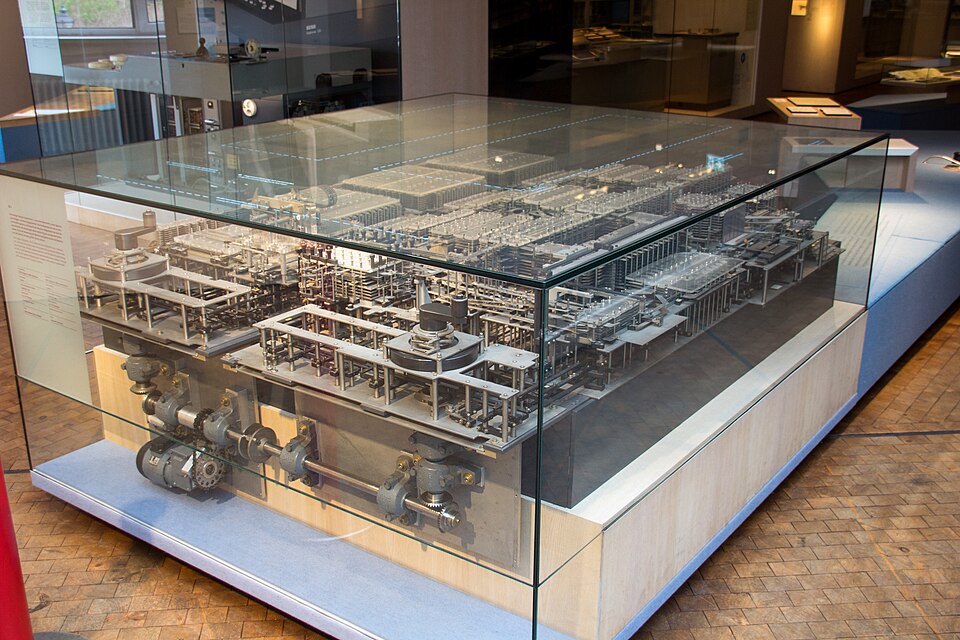
Máquinas de Zuse
Konrad Zuse (Berlín, 1910- Hünfeld, 1995) pensaba y soñaba con gigantescos ductos de información, atravesando los espacios exteriores e interiores de las ciudades. El ser humano tendría entonces más tiempo y podría dedicarse a asuntos más interesantes y desafiantes, como el arte. Zuse tenía un sueño y una idea: “Metrópolis”, como el mismo nombre de la película. La idea era una ciudad en la que todos los procesos de transporte e intercambio de bienes y personas se realizaría a través de una compleja red de trenes y pistas, facilitándole a sus ciudadanos, con el ritmo armónico de una nueva naturaleza, un nuevo bienestar. Zuse soñaba con una máquina que piense por nosotros. Aunque no las preguntas fundamentales, relacionadas con el universo o el origen y destino de las cosas y los seres; sino máquinas que realizaran de manera automática miles de cálculos. Desde el 1 + 1 y el 1 + 2 hasta los algoritmos y los números complejos. Necesitábamos asistencia para liberarnos de las tareas más monótonas. Para calcular. Algo así como contadores. Ordenadores. Computadoras.
La Z1 fue el primer intento. La máquina consistía en una estructura de lata, llena de interruptores de dos posiciones. El aparato era totalmente electromecánico, compuesto de interruptores mecánicos y una memoria hecha a partir de láminas de metal. La Z1 podía ser programada a través de tarjetas perforadas, hojas con información codificada en forma de agujeros.“Con la ayuda de esta suerte de primitivo cerebro mecánico será posible resolver todas las operaciones que están al alcance de un mecanismo” escribiría en la tarde del 20 de junio de 1937 Konrad Zuse en su diario de vida. El principio era sencillo, las aspiraciones ambiciosas, los resultados, premonitorios. Lo que hacía Zuse era “calcular con latas”, construyendo el principio matemático de lo que hoy conocemos como “operaciones booleanas”, en las que se basan cosas tan cotidianas como los buscadores de Internet. Él le llamaba “Schaltalgebra”, algo así como “álgebra de encendidos y apagados”, aludiendo a los circuitos compuestos de elementos metálicos que tenían contacto entre sí o lo perdían.
Los interruptores se basaban en un principio sencillo, el de resumir grandes números en muchas operaciones simples: adiciones, sustracciones, multiplicaciones y divisiones de unos y ceros. Ya en 1937 la Z1 estaba terminada. El paso siguiente sería la nueva versión, la Z2, terminada en 1939, otro experimento que le permitiría indagar en lo realmente necesario para la construcción de una máquina pensante. En 1941 estaría terminada la primera computadora que funcionaba realmente “como relojito”: la Z3 ¿La innovación? En vez de interruptores, la máquina se componía de relés, dispositivos electromagnéticos que sustituían a los interruptores y que se componían de electroimanes y pulsadores sensibles al impulso eléctrico generado al activarse cada uno de ellos. Estos pulsadores se ven como los pulsadores de un clavecín, y eran parte esencial del antiguo sistema telefónico análogo.
Zuse comenzaba a gestar el primer lenguaje computacional. Plankalkül era su nombre. Algo así como “cálculo para proyectos” y llegaría a manifestarse de manera plena en la Z4 en 1945.
La Mecatrónica
La mecatrónica surge de la combinación sinérgica de distintas ramas de la ingeniería, entre las que destacan: la mecánica de precisión, la electrónica, la informática y los sistemas de control. Su principal propósito es el análisis y diseño de productos y de procesos de manufactura automatizados.
Nace en Japón a final de la década de los sesenta con la integración de las ingenierías mecánica y electrónica con el objetivo de incorporar las dos ingenierías en los productos electrónicos. El ingeniero japonés Tetsuro Mori acuñó "mecatrónica" (meca-trónica) en 1969, derivado de "mecanismo" y "electrónica". La Yaskawa Electric Corporation popularizó el término en los 70, enfocándose en la integración de la electrónica en sistemas mecánicos de alta precisión.
En resumen, la mecatrónica evolucionó de una disciplina enfocada en la automatización a un campo multidisciplinario que fusiona la ingeniería mecánica, electrónica, informática y de control para diseñar sistemas complejos y autónomos.

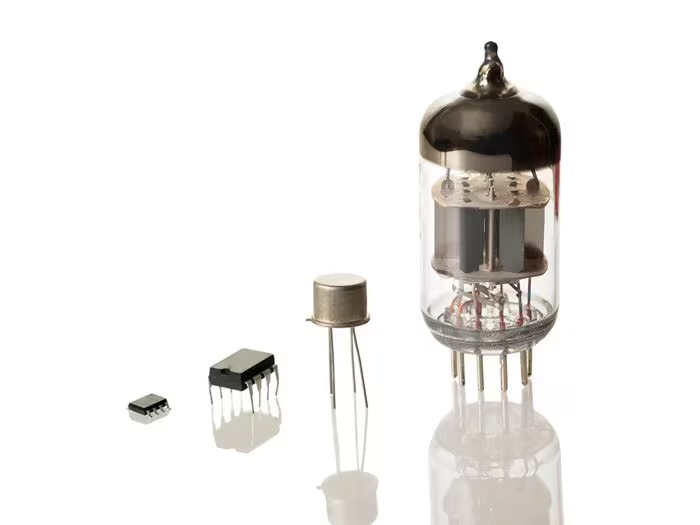
El Transistor
Un transistor es un componente semiconductor, generalmente con al menos tres terminales que se conectan a un circuito electrónico, que restringe o permite el flujo de corriente eléctrica entre dos contactos según la presencia o ausencia de corriente en un tercer contacto. El término transistor proviene del acrónimo transfer resistor (en español resistor de transferencia).
El 22 de octubre de 1925, Julius Edgar Lilienfeld patentó el transistor de efecto de campo (FET). En 1928, también patentó el transistor de efecto de campo metal-óxido-semiconductor (MOSFET). El transistor de contacto puntual, desarrollado mucho más tarde (Bell Labs, 1948), fue un callejón sin salida. Hoy en día, casi todos los miles de millones de billones de transistores de nuestras computadoras y teléfonos inteligentes son FET del tipo Lilienfeld.
El primer transistor comercial de silicio fue producido por Texas Instruments en 1954 gracias al trabajo del experto Gordon Teal quien había trabajado previamente en los Laboratorios Bell en el crecimiento de cristales de alta pureza. El primer transistor MOSFET fue construido por el coreano-estadounidense Dawon Kahng y el egipcio Martin Atalla, ambos ingenieros de los Laboratorios Bell, en 1960.
Los transistores se utilizan en casi todos los dispositivos electrónicos modernos. Son la base de los circuitos integrados (IC), los microchips, los microprocesadores, las FPGA, los chips de memoria, los conmutadores electrónicos, las fuentes de alimentación y mucho más. Como resultado, casi todos los dispositivos electrónicos modernos constan, al menos, de un transistor o de millones de ellos.
Para la década de 1960, la tecnología de transistores se había convertido en una fuerza tecnológica dominante y las válvulas termoiónicas pronto quedaron obsoletas. En 1965, Gordon Moore, el fundador de Fairchild Semiconductor e Intel, predijo que la cantidad de transistores en microchips se duplicaría cada dos años. La Ley de Moore define una relación logarítmica lineal de esta densidad de transistores a lo largo del tiempo. En 1970, los circuitos integrados tenían alrededor de 2000 transistores. Para 2020, los circuitos integrados de última generación tenían más de 10.000 millones.
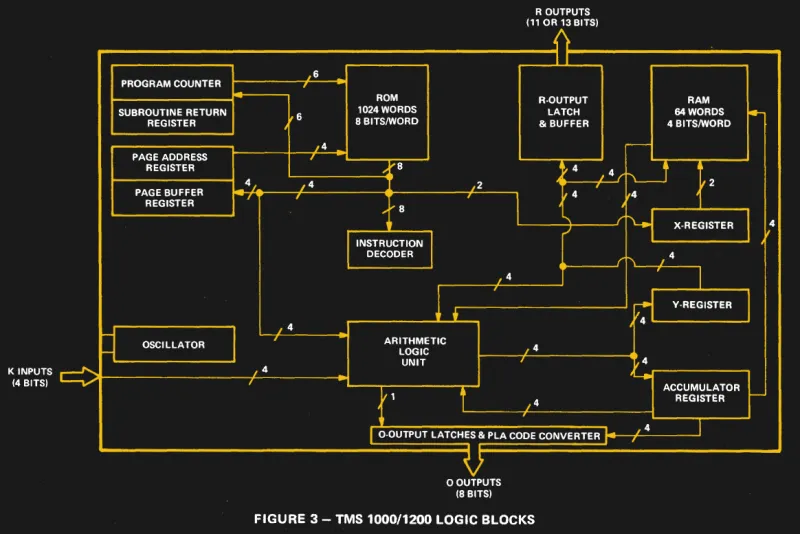
Microcontrolador TMS1000
Muchos de los primeros micro ordenadores fueron diseñados pensando en las calculadoras, como fue el caso, por ejemplo, del Intel 4004. Los fabricantes de calculadoras impulsaron individualmente los avances en el silicio de los procesadores, y en Texas Instruments (TI) esto condujo al desarrollo, en 1971, de los primeros microcontroladores integrados en un solo chip, creados como CPU preprogramadas diseñadas para proporcionar una calculadora en un chip. Pasarían algunos años más, hasta 1974, antes de que produjeran el TMS1000, un microcontrolador de un solo chip destinado a un uso de propósito general y el primero de este tipo en salir a la venta.

Había cuatro variantes en la gama original, todas compartiendo el mismo procesador de 4 bits con arquitectura Harvard, y con diferentes cantidades de líneas de E/S y tamaños de ROM y RAM. Las familias TMS1000 y TMS1200 tenían 8192 bits de ROM de programa y 265 bits de RAM, mientras que las familias TMS1100 y TMS1300 tenían el doble de esas cifras. Existían versiones con salidas tolerantes a alto voltaje para manejar pantallas fluorescentes de vacío, y estaban disponibles en encapsulados de 28 y 40 pines.
No se podía encontrar este chip a la venta en unidades individuales para experimentadores, porque su ROM de máscara integrada solo podía programarse en el momento de la fabricación por TI. Por ello, toda la programación se realizaba en un simulador sobre un mainframe de tiempo compartido operado por TI. Esto generaba un conjunto de tarjetas perforadas que, tras un proceso muy complejo de depuración y pruebas, se utilizaban para crear las máscaras necesarias para la codificación de la ROM.
La programación mediante máscara también significa que cualquier TMS1000 que se encuentre hoy en día seguirá conteniendo el software con el que fue fabricado; sin el hardware circundante original que le dé contexto, tienen poca utilidad más allá de ser una curiosidad histórica.
Para la década de 1980 el mundo ya pertenecía a los microprocesadores y microcontroladores de 8 y 16 bits, por lo que, aparte de sobrevivir unos años más de forma discreta como núcleos para los chips de calculadoras de TI, la serie TMS1000 acabó siendo retirada y desde entonces se ha deslizado casi sin dejar rastro en la historia de la electrónica.
Resulta interesante señalar que algunos de sus contemporáneos siguen muy presentes hoy en día: todavía se pueden comprar muchos derivados de PIC, 8051, Z80 e incluso del 6502, mientras que no hubo sucesores directos de los procesadores TI de 4 bits. El avance imparable de la tecnología es uno de los responsables de esto, pero quizá el desarrollo de software tan arcano también contribuyó a su desaparición.
Esos CPU de 8 bits siguen con nosotros porque cualquiera podía hacerse con una placa de desarrollo y un programador de EPROM y empezar a programar, lo que atrajo a un núcleo de desarrolladores muy familiarizados con sus arquitecturas. En comparación, los desarrolladores del TMS1000 debieron de ser muy pocos, y desde luego no los suficientes como para justificar un silicio sucesor. Hubo algunas versiones especiales de desarrollo del procesador que aceptaban una ROM externa, pero para entonces el mercado ya había avanzado cuatro bits más.
Años 90s: Masificación de Electrónica Doméstica
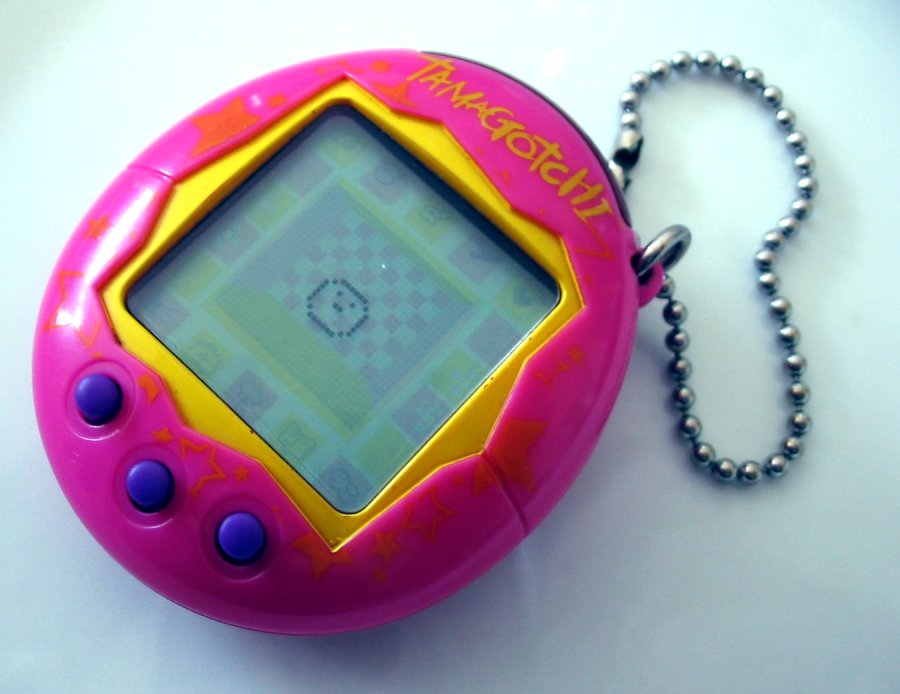
La década de los 90s estuvo marcada por la proliferación de aparatos electrónicos, especialmente en el mercado de juguetes. Entre los que se pueden destacar el Tamagotchi y el Furby.
Un Tamagotchi es un aparato electrónico con la forma y el tamaño de un huevo, y con una pantalla en blanco y negro pixelada, en donde aparece una mascota virtual. Debajo de la pantalla hay 3 botones (A -seleccionar-, B -aceptar- y C -cancelar-) que permiten moverse por el menú. Fue creado por Aki Maita y comercializada en Japón por Bandai el 23 de noviembre de 1996.
Furby (derivado del inglés furball —'bola de pelos'— y baby —'bebé'—) es un juguete animatrónico fabricado actualmente por la compañía Hasbro y que se asemeja a un hámster o un búho. Fue originalmente lanzado en 1998 por Tiger Electronics. Los Furbys fueron el primer intento exitoso de producir y vender un robot dirigido al mercado doméstico.
Un motor eléctrico sencillo y un sistema de levas y engranajes activan el movimiento de ojos y boca del Furby, mueven sus orejas y lo levantan del suelo en una simulación de movilidad.
Esta edición de Furbys ha resultado de interés entre hackers dedicados al circuit bending para su disección y experimentación con sus capacidades de audio avanzadas y diversas interfaces sensoriales.

Años 2000s: Internet
En la década del 2000 el internet llegó a una gran cantidad de hogares y los dispositivos electrónicos como celulares y otros aparatos fueron conectándose a la red.
La primera placa Arduino comercial fue introducida en el año 2005, ofreciendo un bajo costo económico y facilidad de uso para novatos y profesionales.
Años 2010s: Smartphones
En la década del 2010 se masificaron los "smartphones", teléfonos con la capacidad de conectarse a internet, pero también con múltiples funciones adicionales como cámaras, giroscopio, magnetrómetro y gps.
Las empresas utilizaron estas capacidades para conectar y manipular dispositivos, comunmente enviándo datos a una "nube".
Años 2020s: IA y LLMs
La llegada de los LLM (Large Language Models) como ChatGPT en los primeros años de la década del 2020, logró realizar un cambio rotundo en la forma de interactuar con los sistemas informáticos y la industria en general, como también concientizar sobre la protección de los datos privados.
Los sistemas de robótica, domótica y aparatos domésticos e industriales del futuro podrán ser más complejos y realizar tareas nunca antes posible gracias a las capacidades de los LLM, los cuales son mejorados y optimizados cada día. Algunos de estos modelos pueden ser ejecutados de forma local (sin acceder a la "nube") con pocos recursos. Sin embargo siempre se debe considerar las consecuencias ambientales y de privacidad asociadas.
Referencias
-
https://historia.nationalgeographic.com.es/a/inventos-medievales_6644
-
https://www.microsiervos.com/archivo/ingenieria/-fascinantes-automatas-jaquet-droz.html
-
https://mediartinnovation.com/2014/06/11/karel-capek-rossums-universal-robots-rur-1921/
-
https://alemaniaparati.diplo.de/mxdz-es/aktuelles/konradzuse-1087764
-
https://mecatronicaito.wordpress.com/2015/11/26/la-historia-de-la-mecatronica/
-
https://teinco.edu.co/resumen-historico-de-la-ingenieria-mecatronica/
-
https://hackaday.com/2020/02/18/the-tms1000-the-first-commercially-available-microcontroller/
-
https://people.idsia.ch/~juergen/who-invented-the-transistor.html