Protocolo I2C
El Circuito inter-integrado (I²C, del inglés Inter-Integrated Circuit) es un bus serie de datos desarrollado en 1982 por Philips Semiconductors. Se utiliza principalmente internamente para la comunicación entre diferentes partes de un circuito, por ejemplo, entre un controlador y circuitos periféricos integrados. El sistema original fue desarrollado por Philips a principios de 1980 con el fin de controlar varios chips en televisores de manera sencilla.
El protocolo I2C es compatible con diversas placas de desarrollo. Permite conectar varios dispositivos periféricos, como sensores, pantallas, controladores de motores, etc., utilizando solo unos pocos cables. Esto brinda mucha flexibilidad y acelera la creación de prototipos, sin una abundancia de cables.
¿Qué es I2C?
El protocolo I2C implica el uso de dos líneas para enviar y recibir datos: una línea de reloj serie (SCL) que la placa controladora hace oscilar a intervalos regulares, y una línea de datos serie (SDA) por la cual se transmiten los datos entre los dos dispositivos.
En I2C, existe un dispositivo controlador y uno o más dispositivos periféricos conectados a las líneas SCL y SDA del controlador.
Cuando la línea de reloj cambia de bajo a alto (lo que se conoce como el flanco de subida del pulso de reloj), se transfiere un solo bit de información desde la placa hacia el dispositivo I2C a través de la línea SDA. A medida que la línea de reloj continúa generando pulsos, se envían más bits hasta que se forma una secuencia que incluye una dirección de 7 u 8 bits y un comando o dato. Cuando esta información se envía —bit a bit—, el dispositivo llamado ejecuta la solicitud y transmite sus datos de vuelta —si es necesario— a la placa por la misma línea, utilizando la señal de reloj que sigue siendo generada por el controlador en SCL como referencia temporal.
Cada dispositivo en el bus I2C es funcionalmente independiente del controlador, pero responderá con información cuando sea solicitado por este.
Debido a que el protocolo I2C permite que cada dispositivo habilitado tenga su propia dirección única, y a que tanto el controlador como los dispositivos periféricos se turnan para comunicarse a través de una sola línea, es posible que tu placa Arduino se comunique (por turnos) con muchos dispositivos u otras placas utilizando solo dos pines del microcontrolador.
Un mensaje I2C a nivel de bits más bajo se ve aproximadamente así:
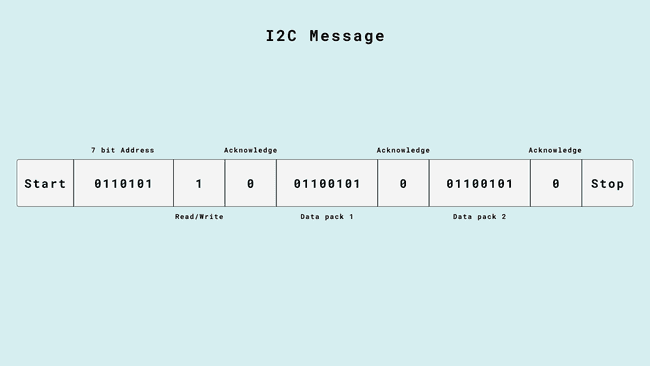
El controlador envía instrucciones a través del bus I2C por el pin de datos (SDA), y dichas instrucciones van precedidas por la dirección, de modo que solo el dispositivo correcto las escuche.
Luego hay un bit que indica si el controlador desea leer o escribir. Cada mensaje debe ser confirmado para evitar resultados inesperados; una vez que el receptor ha reconocido la información previa, se lo indica al controlador para que pueda pasar al siguiente conjunto de bits.
-
8 bits de datos
-
Otro bit de confirmación (acknowledgement)
-
8 bits de datos
-
Otro bit de confirmación
Pero, ¿cómo saben el controlador y los periféricos dónde comienzan y terminan la dirección, los mensajes, etc.? Para eso sirve el cable SCL. Este sincroniza el reloj del controlador con el de los dispositivos, asegurando que todos avancen a la siguiente instrucción al mismo tiempo.
Estándares Qwiic, Stemma QT y Grove
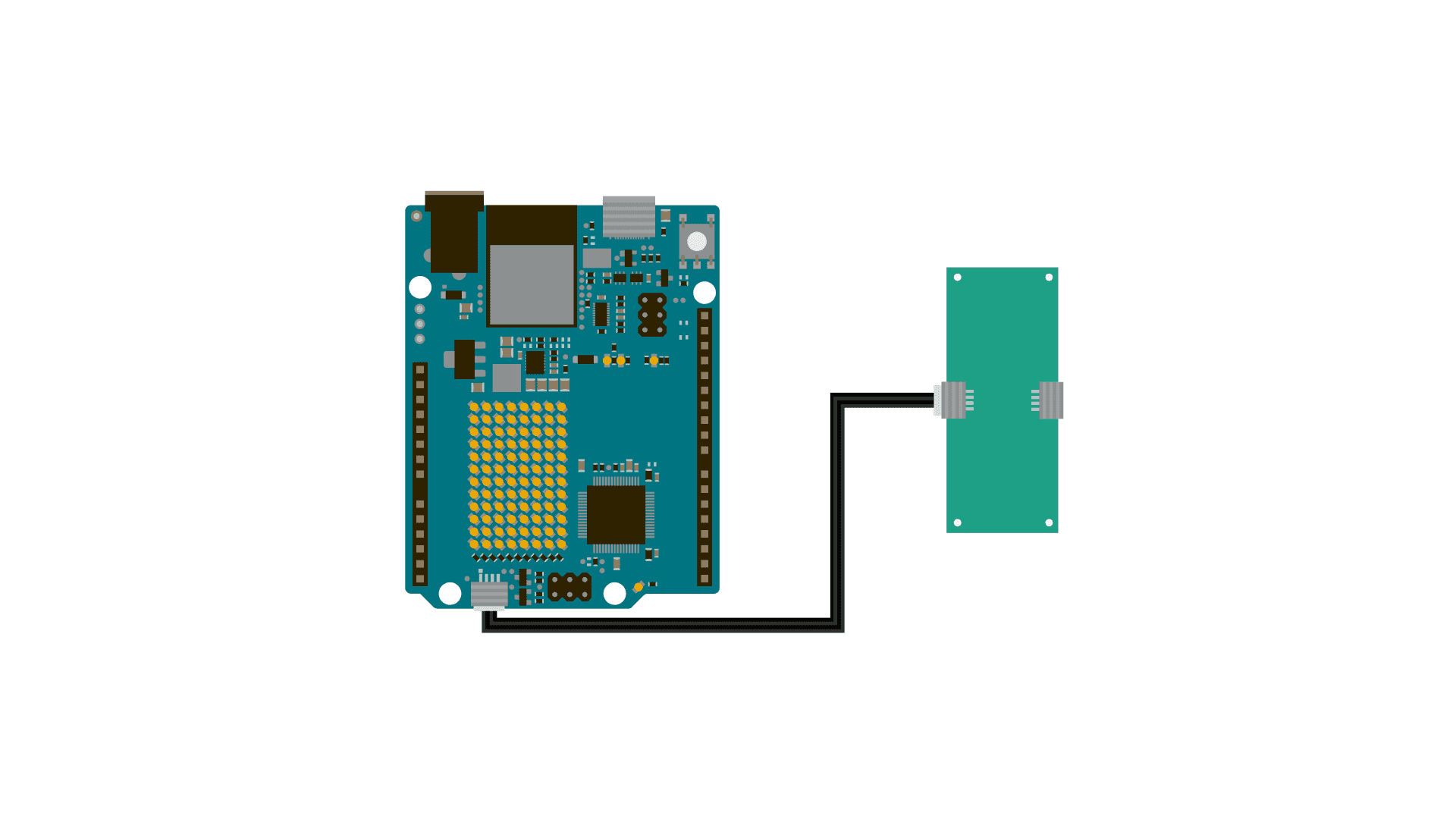
Existen múltiples estándares creados utilizando el protocolo I2C. Ejemplos de estos estándares son Qwiic, desarrollado por SparkFun, y STEMMA QT, desarrollado por Adafruit®.
Tanto Qwiic como STEMMA QT utilizan un conector JST SH de 4 pines para dispositivos I2C, lo que facilita que terceros diseñen hardware con una amplia compatibilidad. Al contar con un conector estandarizado, sabrás que si ves la palabra Qwiic o STEMMA QT asociada a un producto, este funcionará junto con una placa que tenga un conector Qwiic o STEMMA QT.
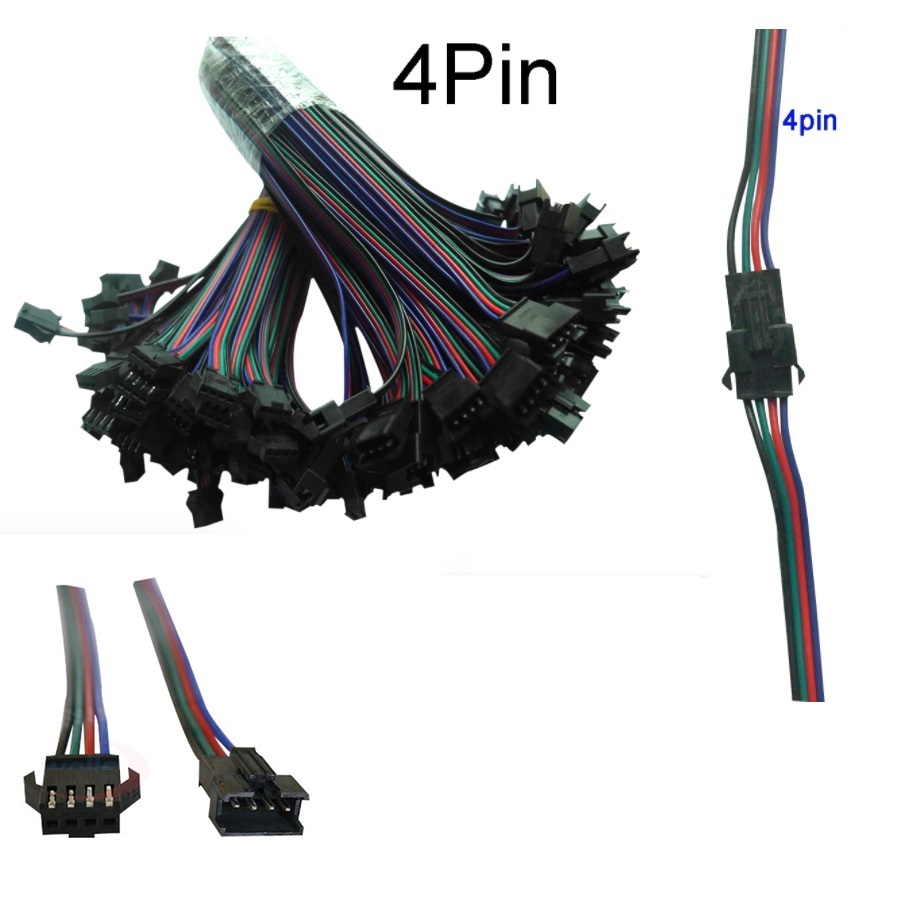
Tanto Qwiic como STEMMA QT agrupan en un solo cable los conductores de alimentación, tierra (GND) y las líneas SDA y SCL para I2C, lo que los convierte en un kit completo: un único cable que integra todo.
La principal diferencia es que Qwiic incorpora adaptación de niveles y regulación de voltaje en el controlador (pero no en los periféricos). Esto significa que Qwiic utiliza únicamente lógica de 3.3 V. Esto facilita su uso, ya que para el usuario final hay una cosa menos que puede salir mal al diseñar y montar el circuito.
STEMMA QT, por otro lado, no cuenta con estas características. Esto permite utilizar módulos tanto de lógica a 3.3 V como a 5 V. También implica que hay un aspecto adicional que se debe tener en cuenta al crear el circuito, pero a cambio ofrece mayor flexibilidad en los requisitos de alimentación y lógica.
El orden de los pines de STEMMA QT está diseñado para coincidir con el orden de pines de Qwiic, lo que permite la compatibilidad cruzada entre ambos estándares.
Grove es otro estándar de conector, desarrollado por Seeed Studio. Puedes encontrar una gran variedad de módulos con conector Grove; sin embargo, solo algunos de ellos utilizan I2C.
Conectar Múltiples Placas
En algunas situaciones, puede ser útil configurar dos (¡o más!) placas para que compartan información entre sí. En este ejemplo, dos placas Arduino están programadas para comunicarse entre ellas en una configuración de Controlador lector / Periférico emisor mediante el protocolo serie síncrono I2C. Para lograr esto se utilizan varias funciones de la biblioteca Wire de Arduino.
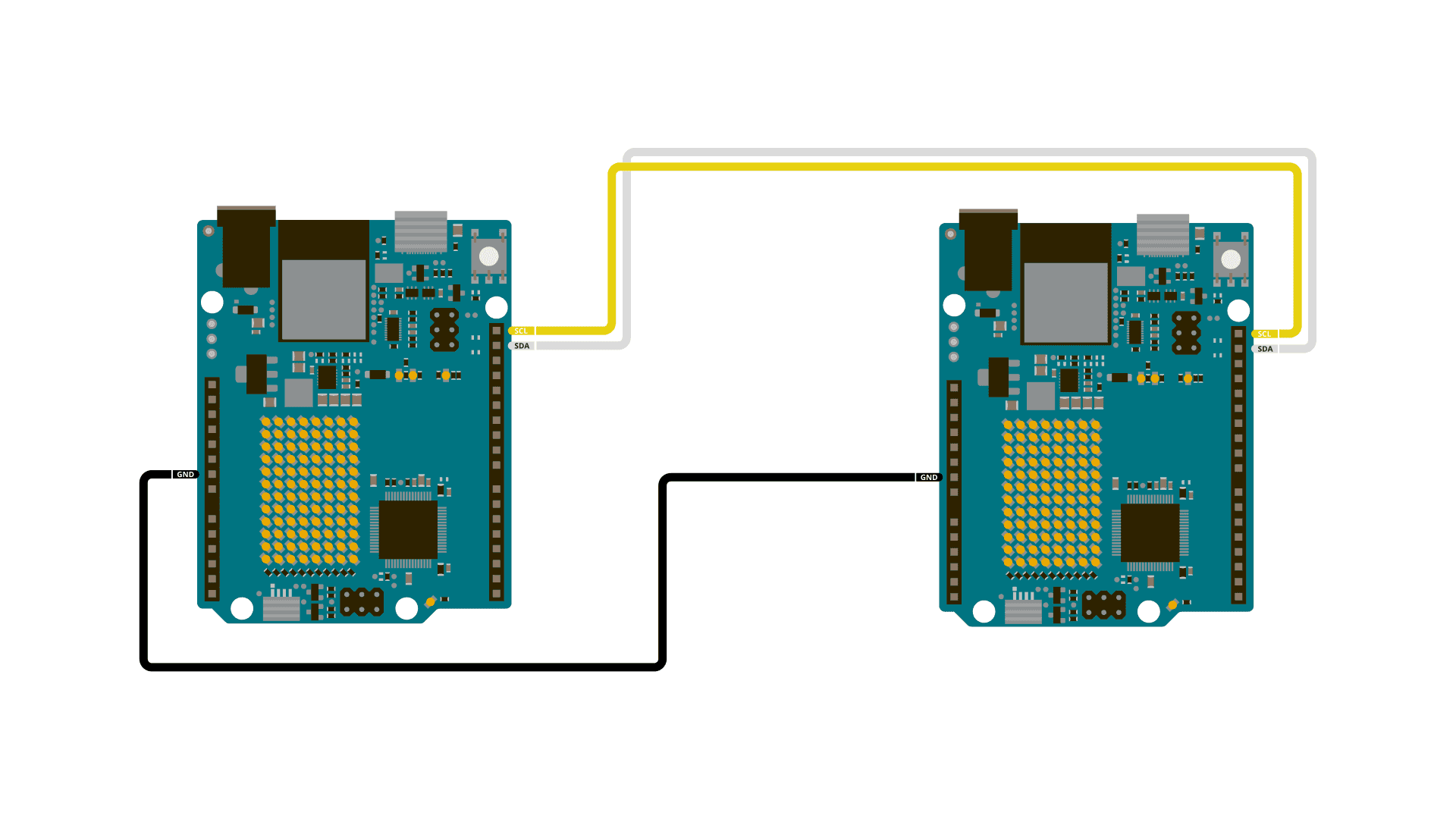
El Controlador, está programado para solicitar y luego leer 6 bytes de datos enviados desde el Arduino Periférico, que tiene una dirección única. Una vez que se recibe ese mensaje, puede visualizarse en la ventana del monitor serie del software Arduino (IDE).
// Wire Controller Reader
// by Nicholas Zambetti [http://www.zambetti.com](http://www.zambetti.com)
// Demonstrates use of the Wire library
// Reads data from an I2C/TWI peripheral device
// Refer to the "Wire Peripheral Sender" example for use with this
// Created 29 March 2006
// This example code is in the public domain.
#include <Wire.h>
void setup() {
Wire.begin(); // join i2c bus (address optional for master)
Serial.begin(9600); // start serial for output
}
void loop() {
Wire.requestFrom(8, 6); // request 6 bytes from peripheral device #8
while (Wire.available()) { // peripheral may send less than requested
char c = Wire.read(); // receive a byte as character
Serial.print(c); // print the character
}
delay(500);
}// Wire Peripheral Sender
// by Nicholas Zambetti [http://www.zambetti.com](http://www.zambetti.com)
// Demonstrates use of the Wire library
// Sends data as an I2C/TWI peripheral device
// Refer to the "Wire Master Reader" example for use with this
// Created 29 March 2006
// This example code is in the public domain.
#include <Wire.h>
void setup() {
Wire.begin(8); // join i2c bus with address #8
Wire.onRequest(requestEvent); // register event
}
void loop() {
delay(100);
}
// function that executes whenever data is requested by master
// this function is registered as an event, see setup()
void requestEvent() {
Wire.write("hello "); // respond with message of 6 bytes
// as expected by master
}